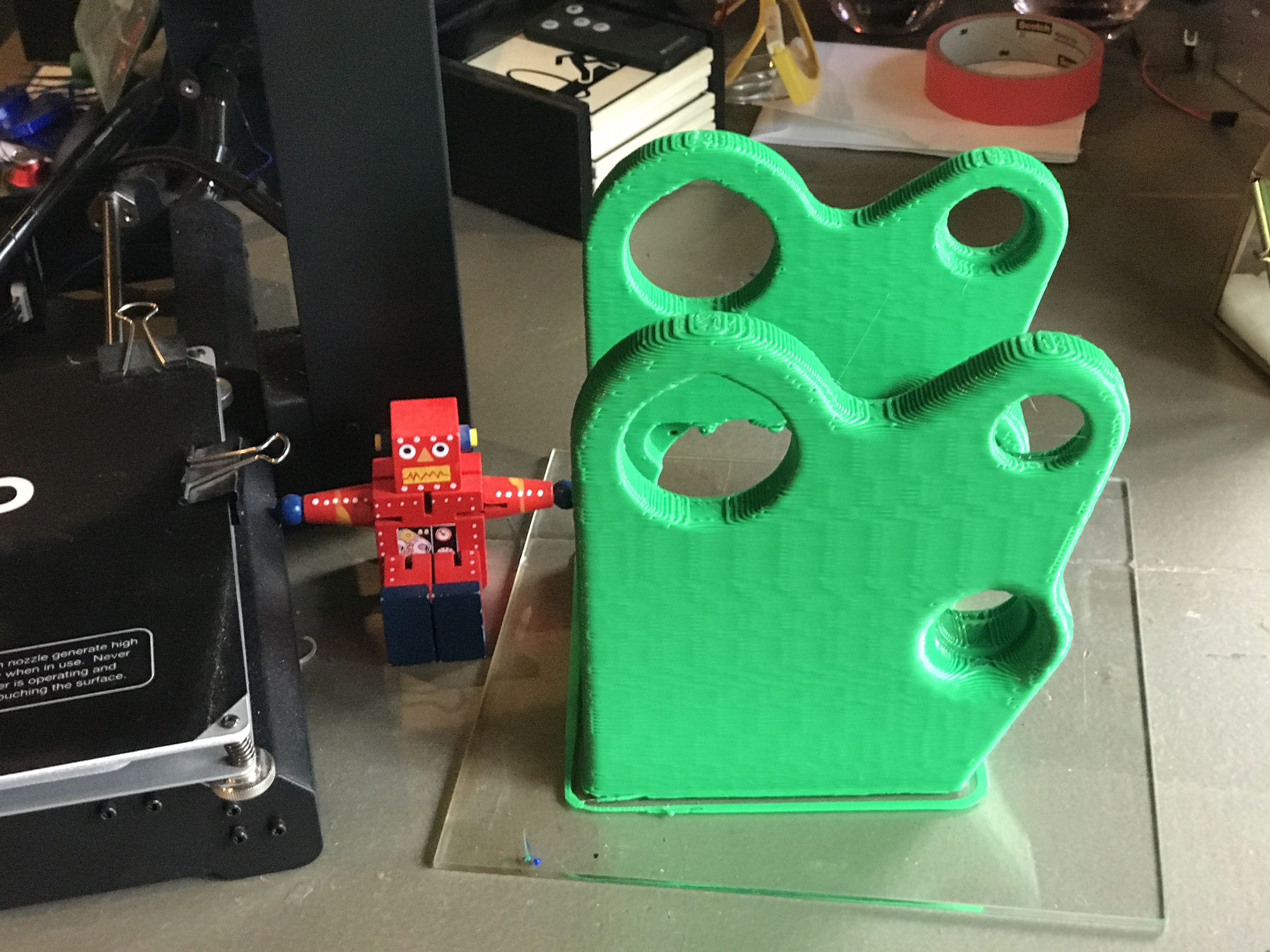
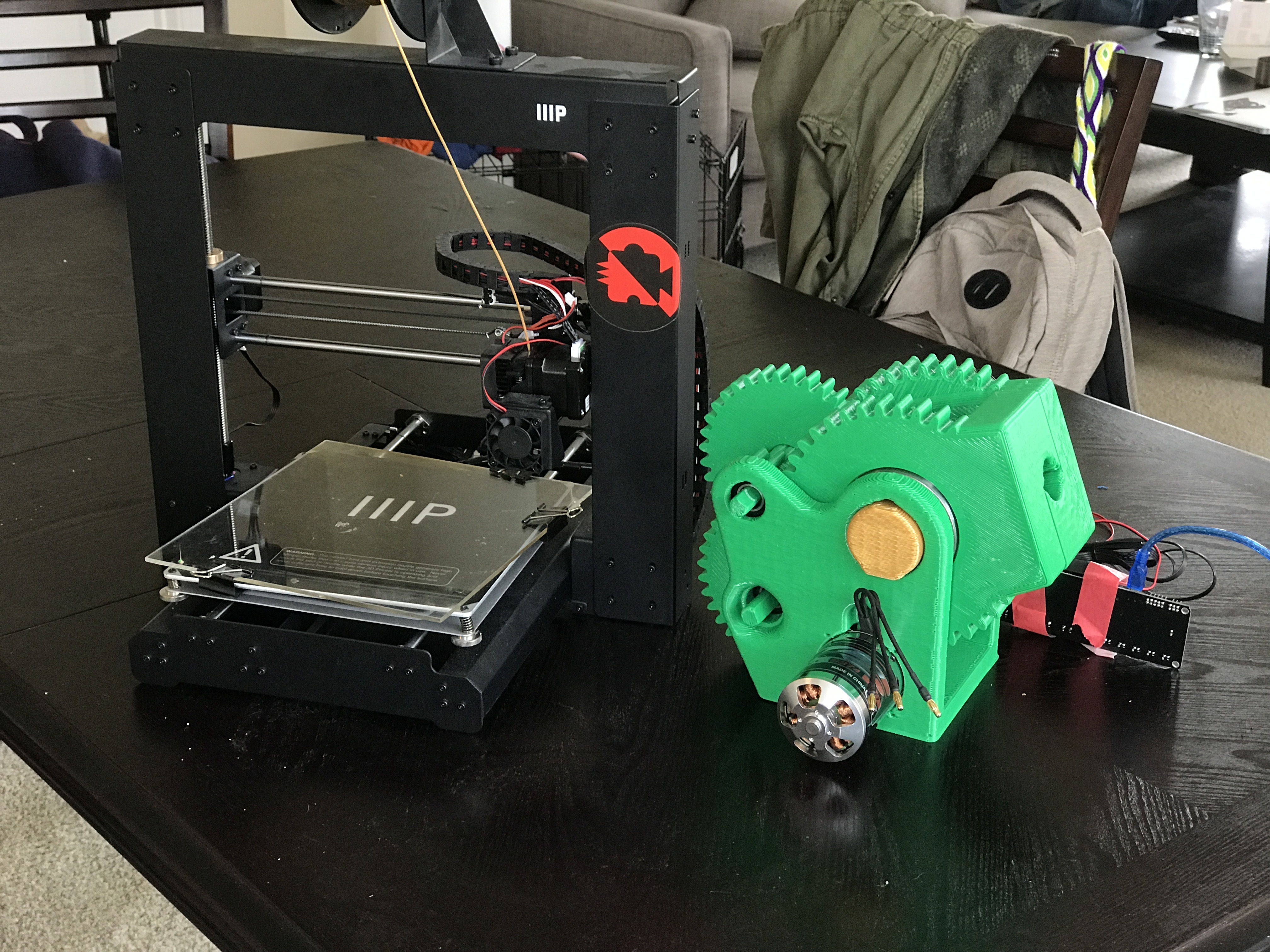
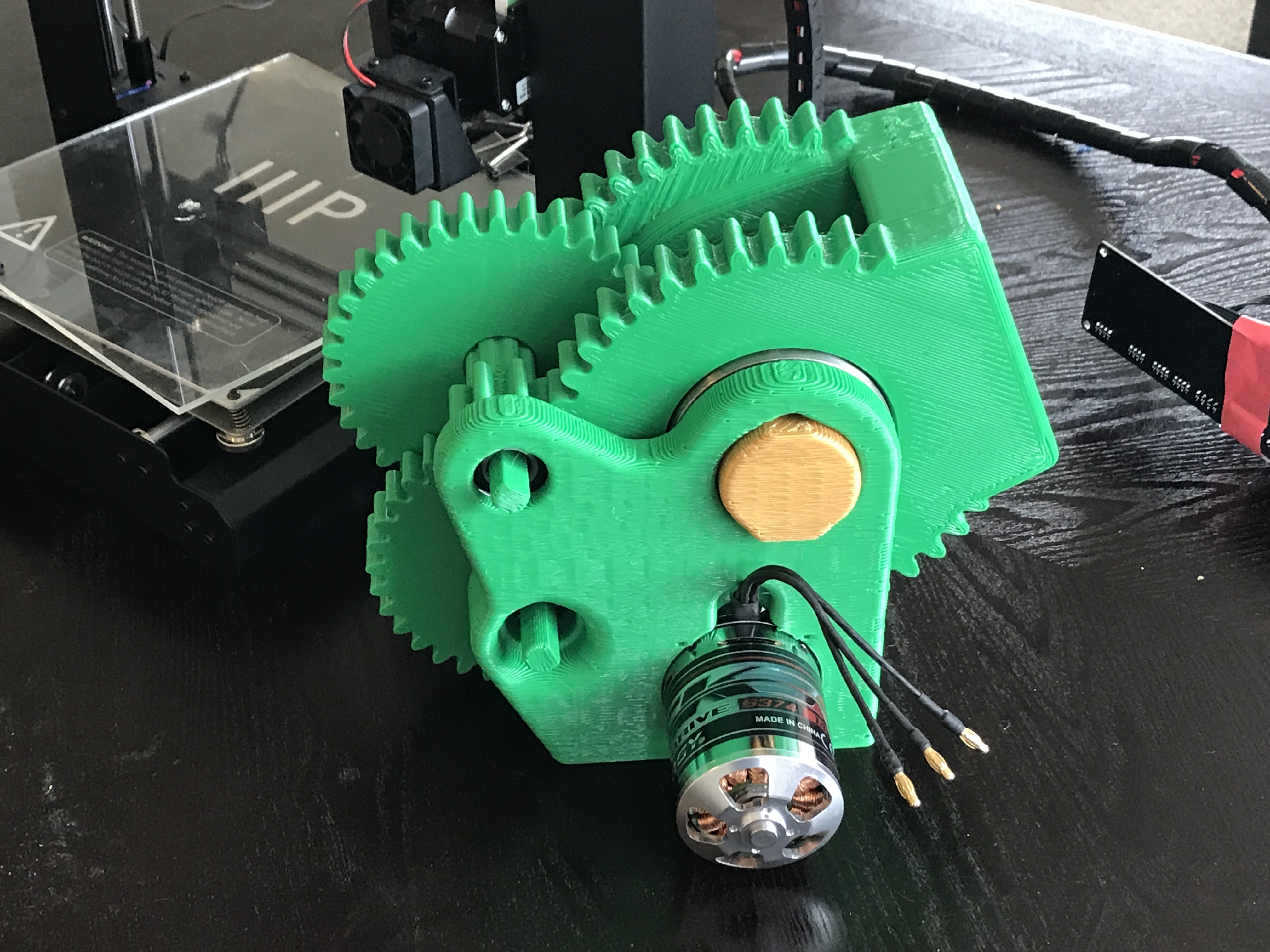
As per previous discussion here I started designing a 3D printed robot arm. I’ve been delaying posting a little as I want to do a proper write up with better pictures (and video!) but I decided to post a short preview for now to let people see it.
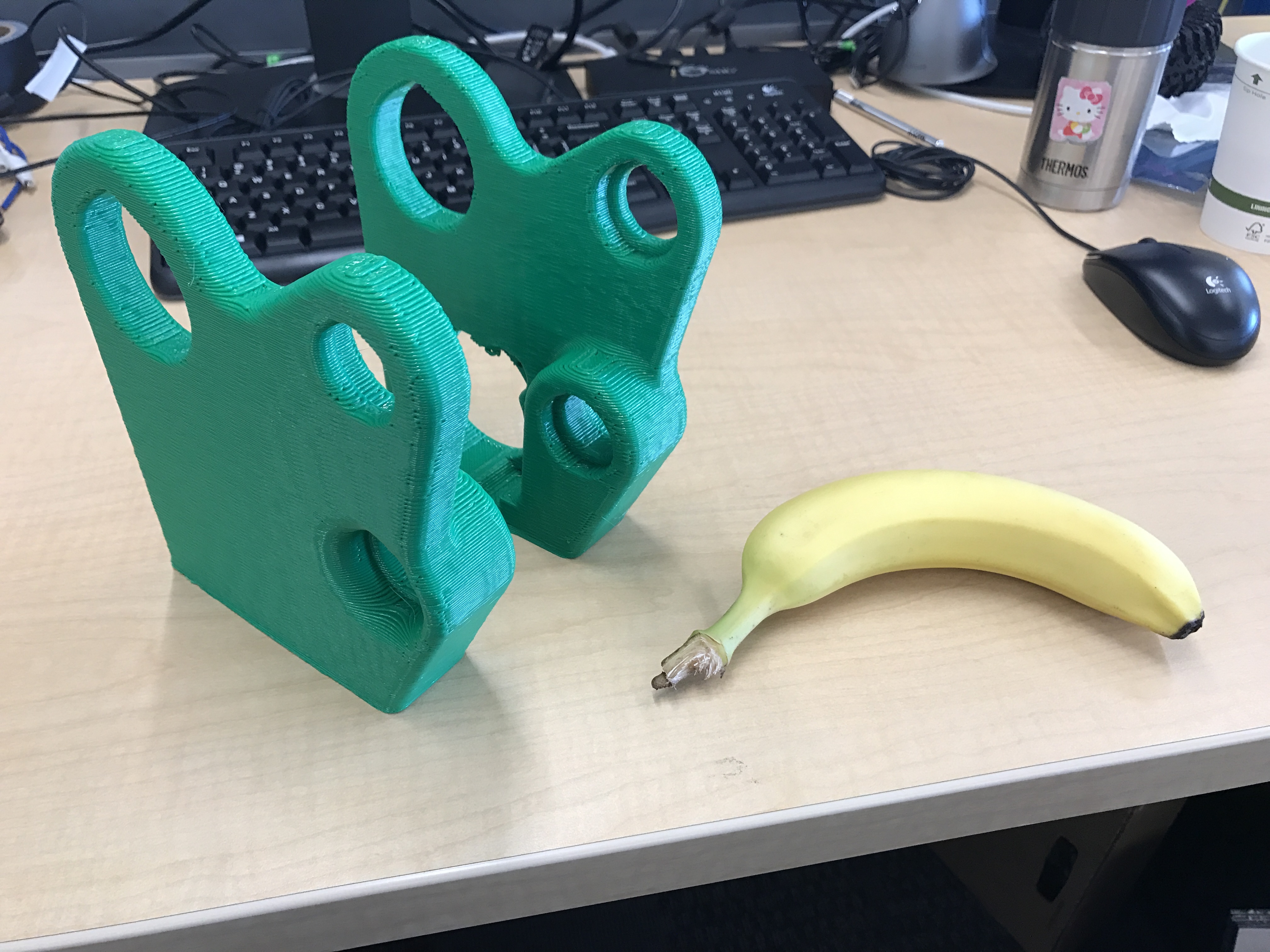
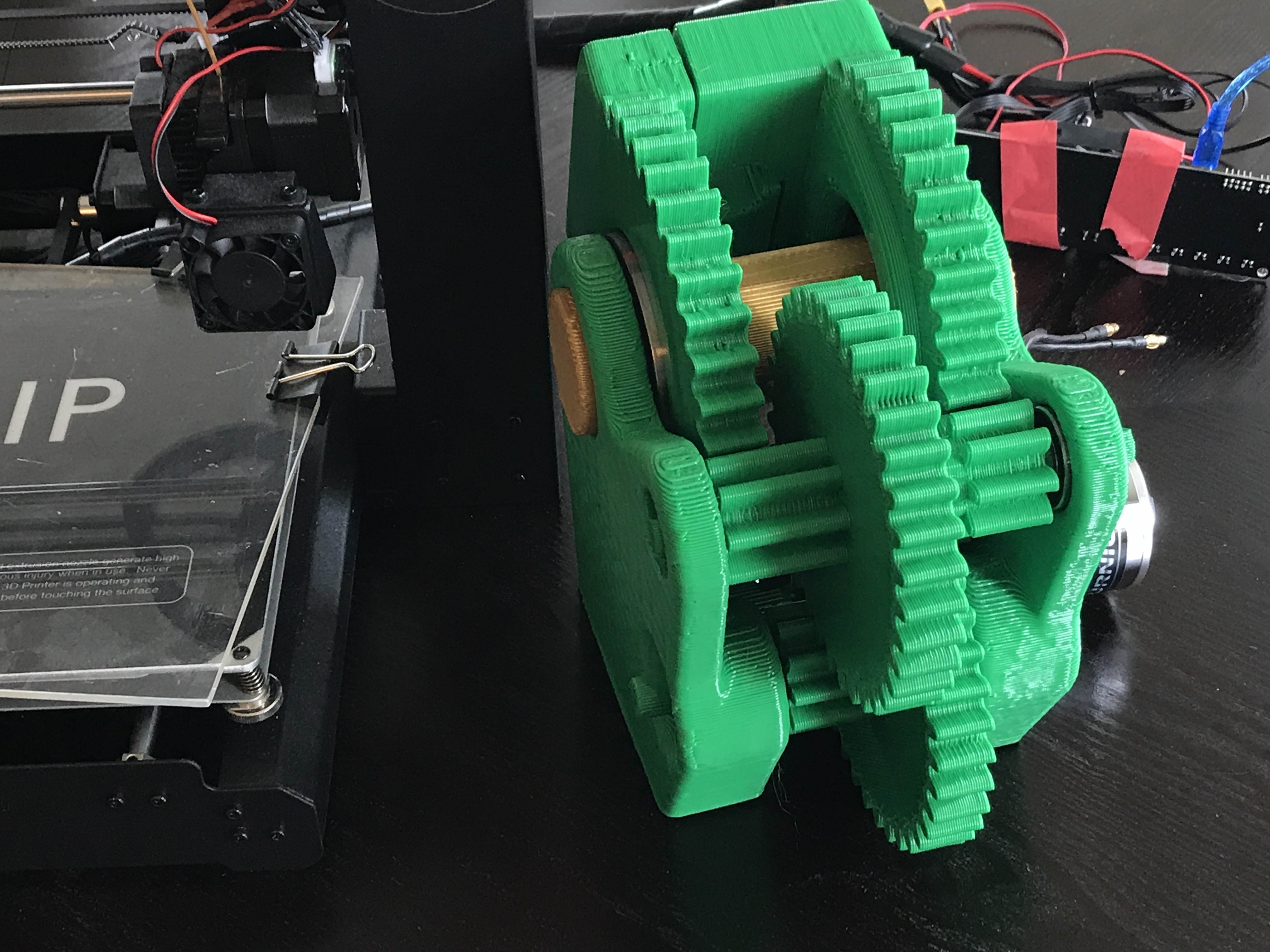
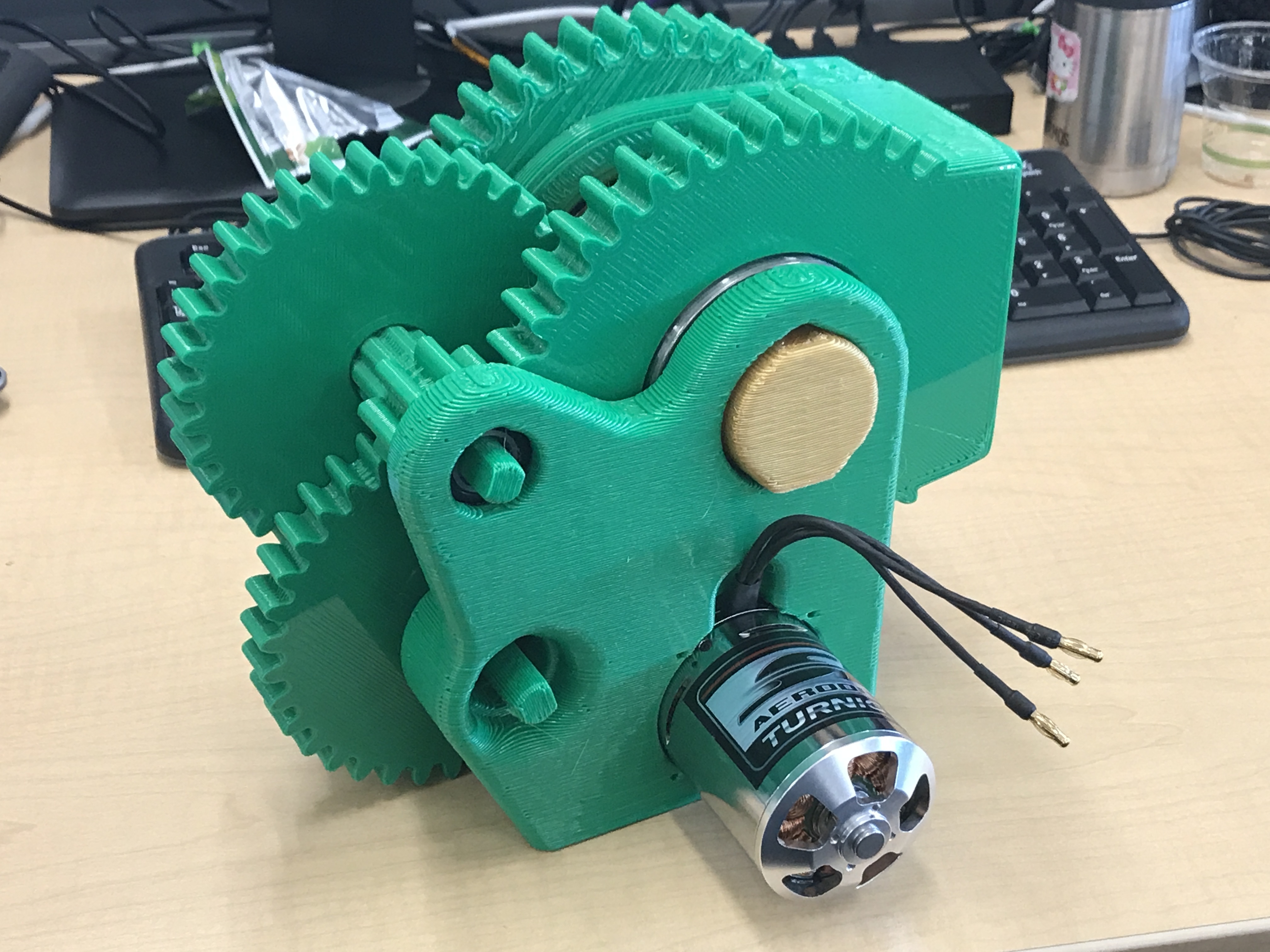
So far I’ve got a single axis constructed. This will let me test the basic principles before going further. I hope to make this a four axis arm with provisions for a two axis wrist to be added. The arm will be similar dimensions to a human arm and my goal is to use it for manufacturing.
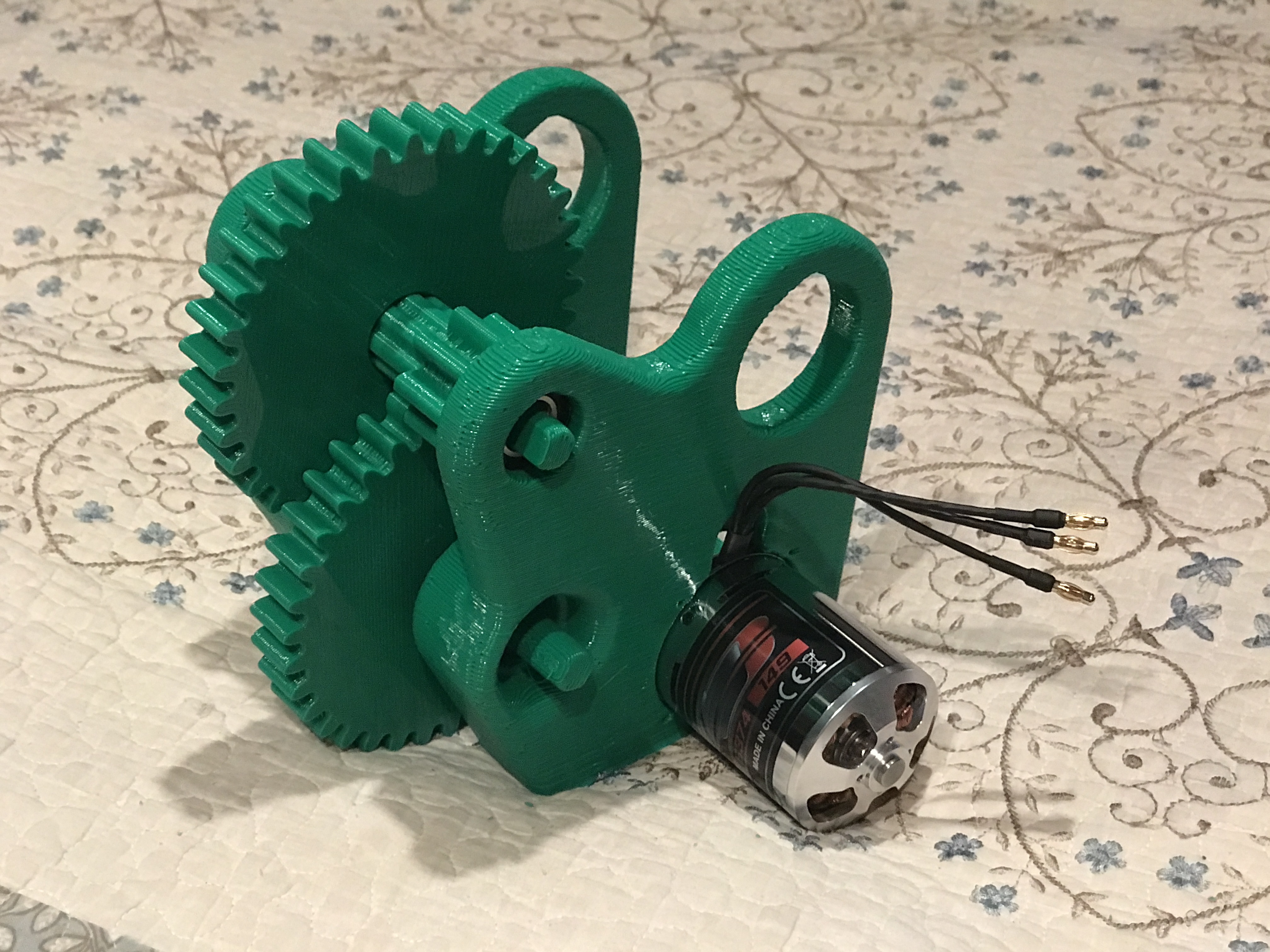
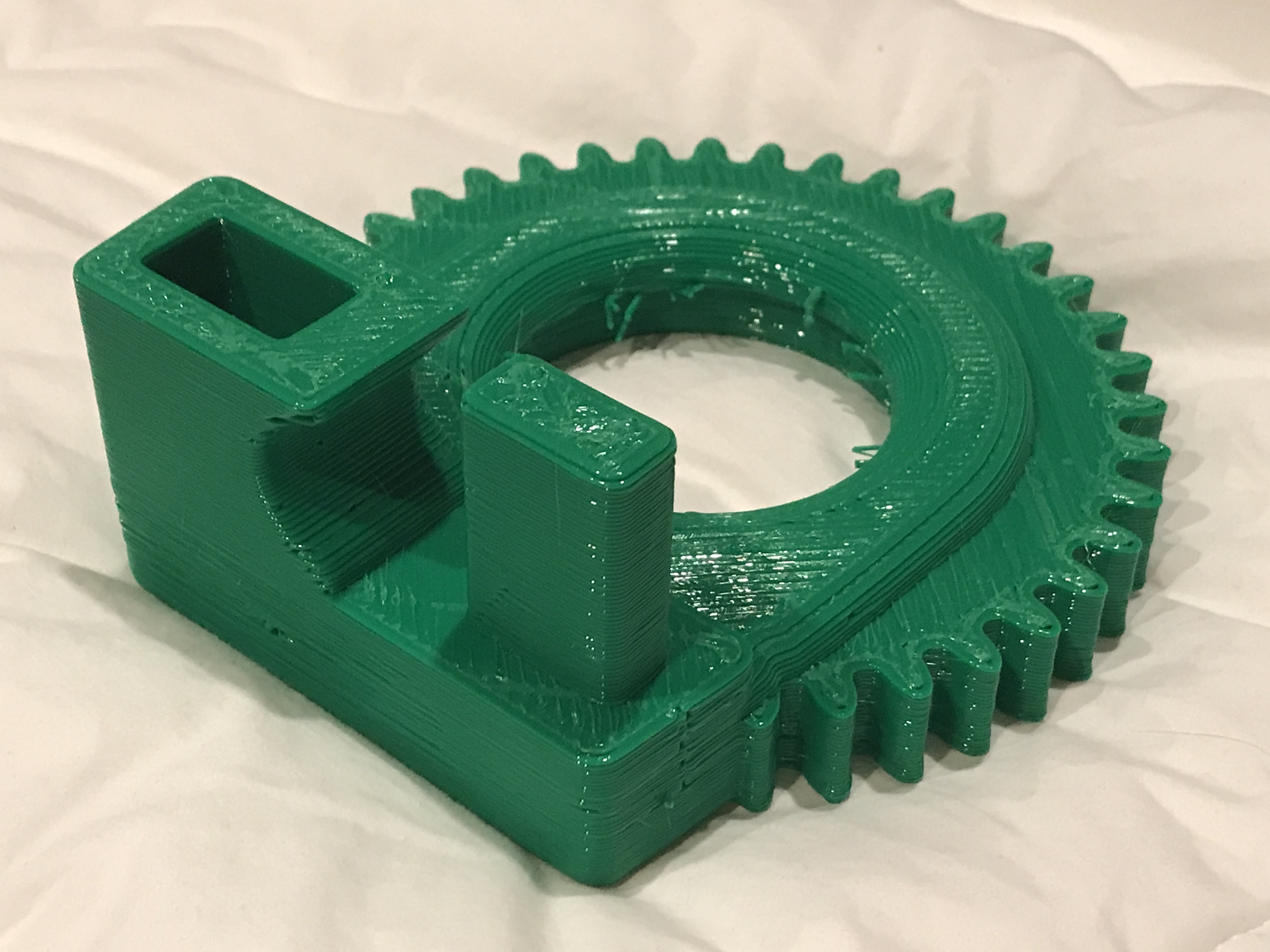
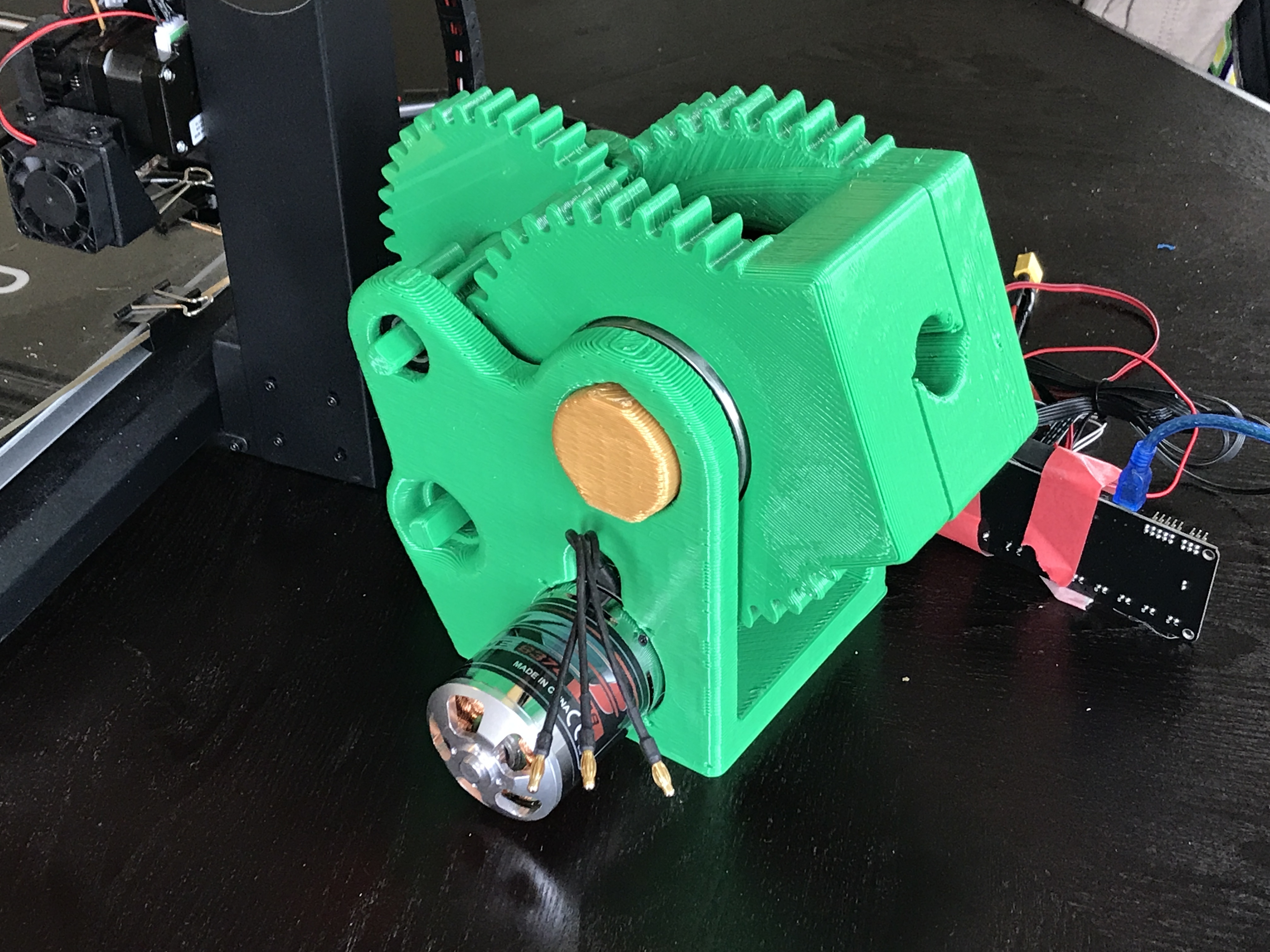
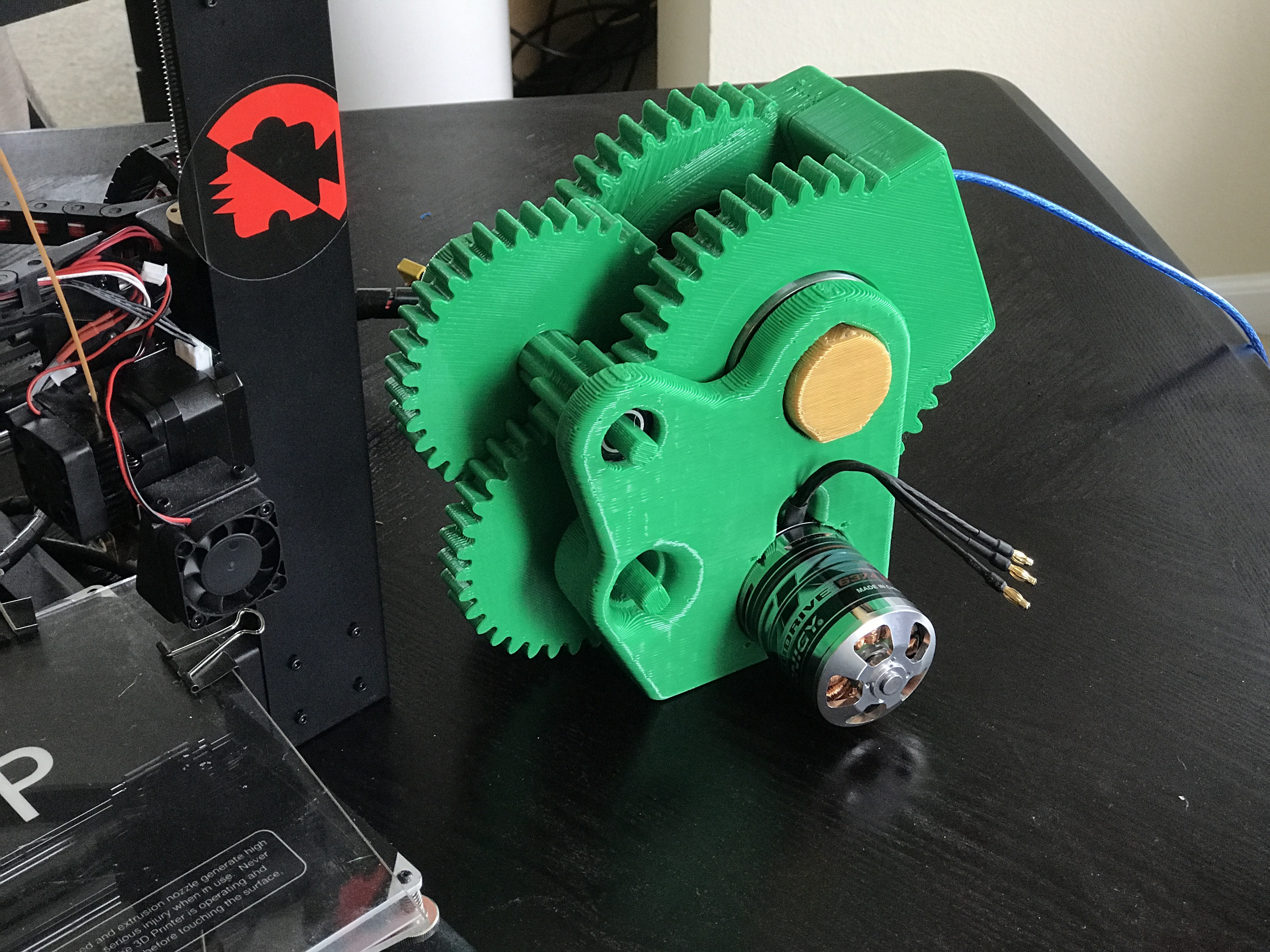
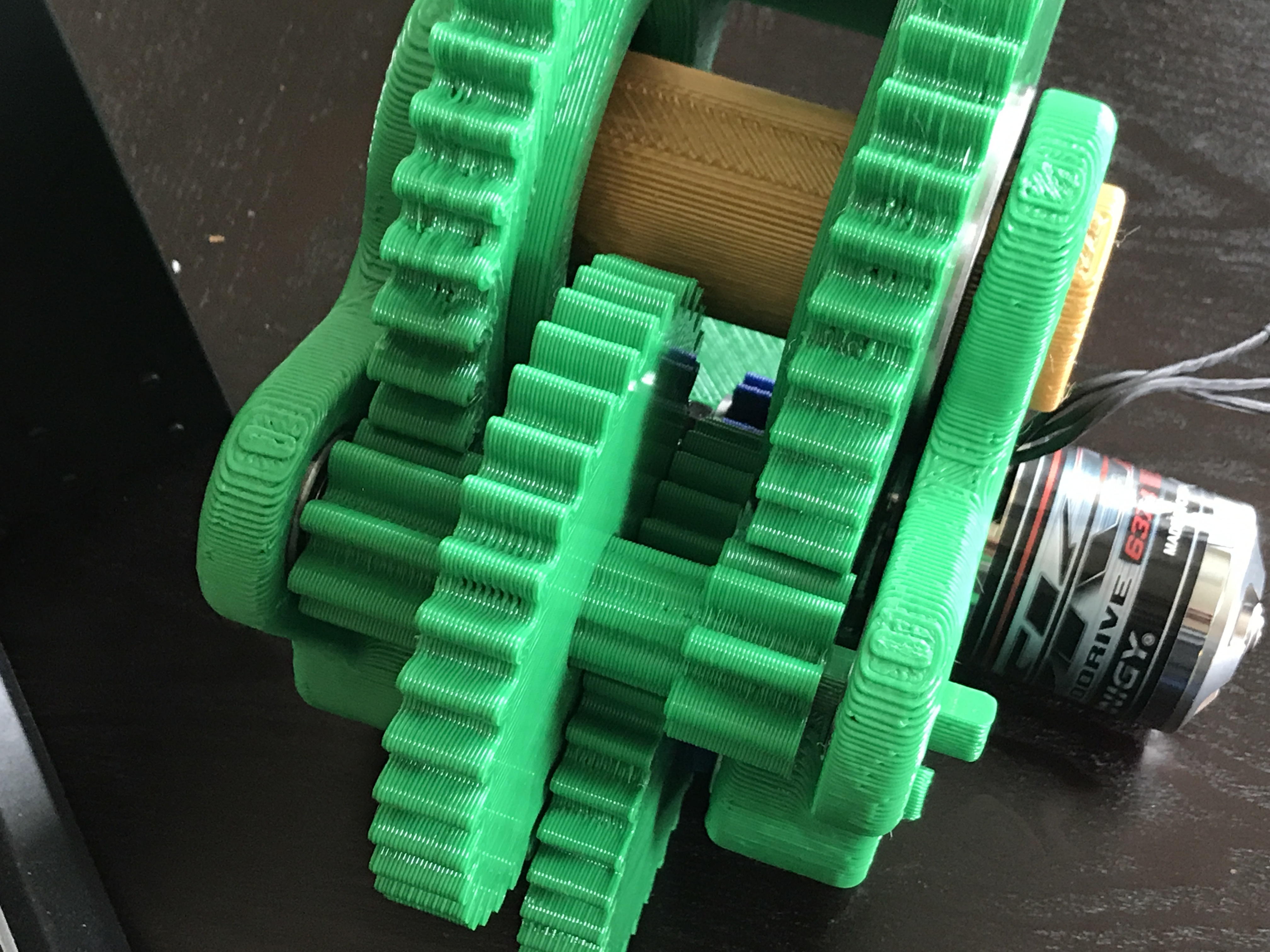
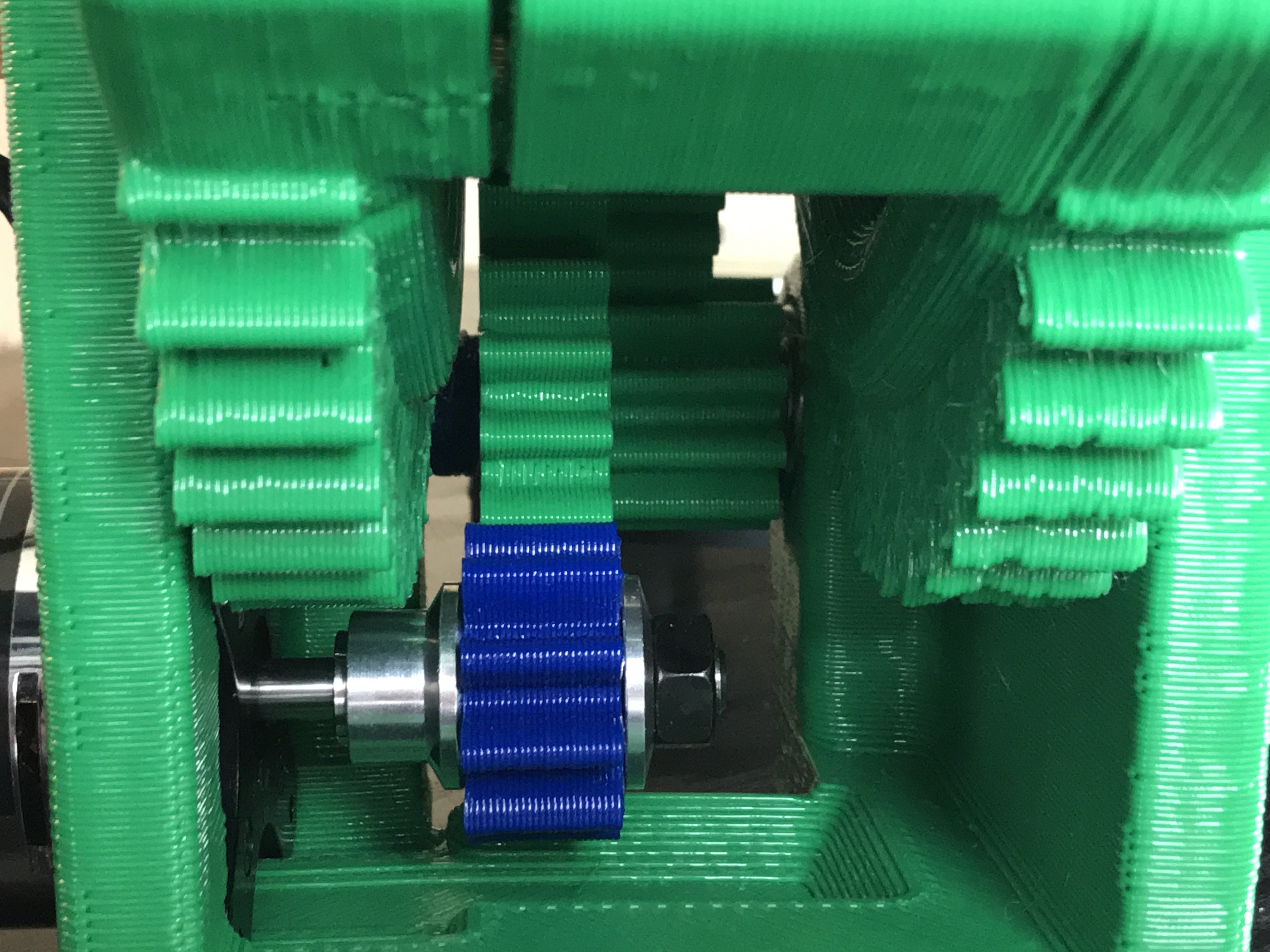
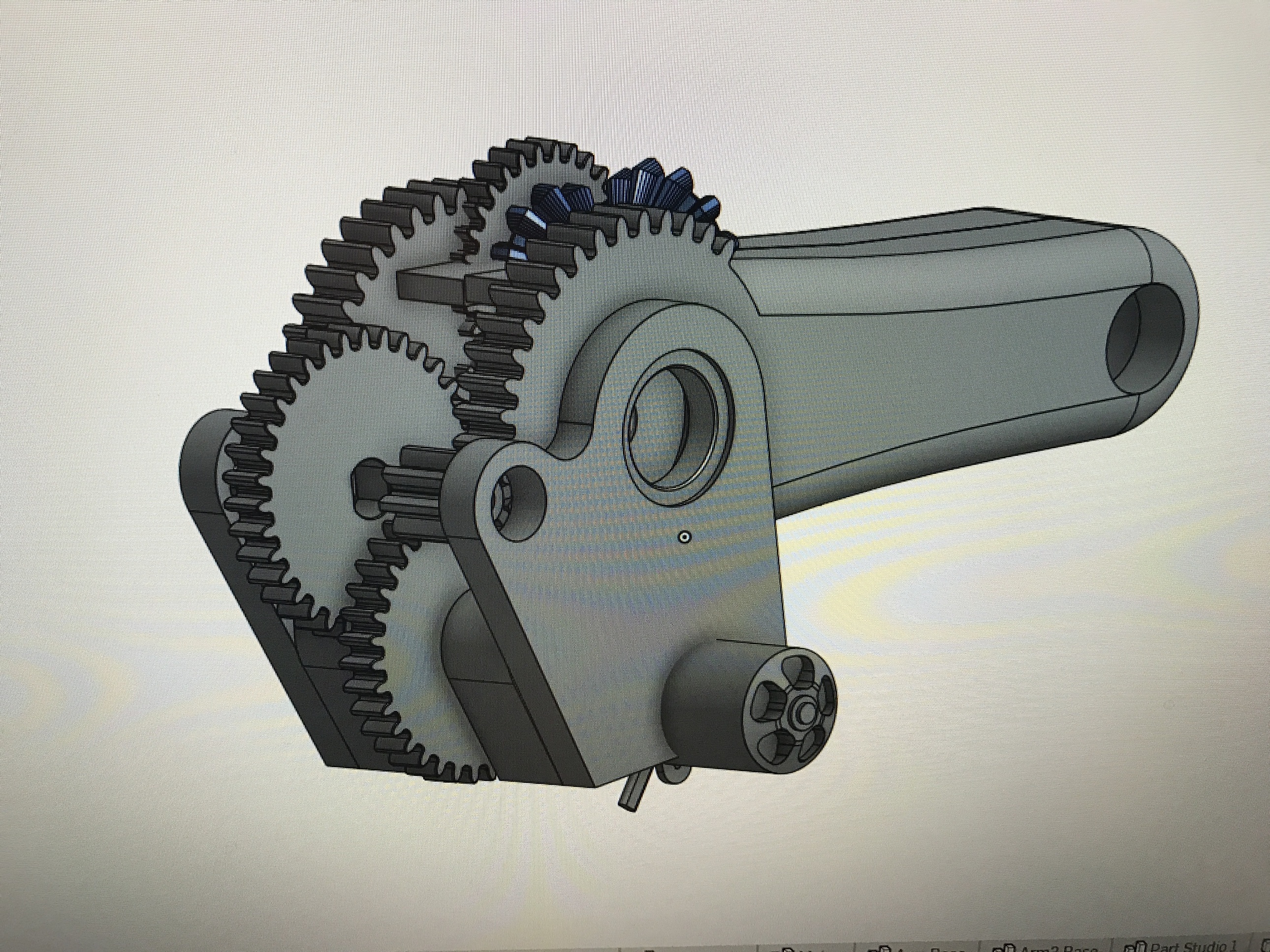
This axis uses a Turnigy SK3 63-74 149kv motor. The gears net a 62.5:1 reduction. Basic torque calculations show that with this reduction you could theoretically lift 10kg at 1 meter. Naturally the arm won’t be that strong (it would break) but this shows that we will be limited by other factors. My design goal is 2kg lift at human arm length.
Cool stuff. I’ve been working on a design myself, but it’s a bit different and for a different purpose. Could be cool to share ideas and experience - I’m struggling with software issues (it’s a scara) but the mechanical system seems pretty good for a prototype.
I’m basically just having trouble finding and setting up some kind of firmware with the right kinematics. I’m currently trying to use Cartesian firmware and just doing the kinematics in the gcode
And interesting issue with the firmware. Are you writing it from scratch or starting from something? I have yet to look in to arm firmware.
I was thinking a Raspberry Pi Zero W and something like ROS with MoveIt might be a good high level driver, where each axis is an independent actuator controlled by the Pi. There are issues with this setup (especially the lack of realtime control), but it might be a good place to start.
I’m not sure I even agree with the architecture I described above, but I thought I’d throw it out there.
I’ve been trying various Marlin configurations, I’ve considered buying different electronics (for example a Smoothieboard or something) and I’ve looked into GRBL, but I’ve yet to find anything that seemed like it would be better. I’ve also been trying to get a linux dual boot running so I could try ROS, but god DAMN Linux is just not my friend. I can’t even get the dual boot working, much less actually use it for anything.
So currently, I’m trying to make a simple program from scratch just to test it. I’m not a great programmer, so it might not get very far, but it would be nice to have some software that is actually useful for the application and somewhat flexible.
The Raspberry Pi/ROS solution sounds great, especially to allow integration of things like computer vision and stuff, but as mentioned, I have a long way to go before I can use Linux efficiently.
I haven’t tried ROS, but it sounds like the closest thing to ideal based on their wiki - I’d like something universal and flexible. I’m finding Marlin difficult to configure to anything but 3d printers, and GRBL isn’t as straight forward as it used to be to install either. I use GRBL on a CNC router I built, but I’m not sure how to install it and configure it.
It’s particularly difficult because it’s a SCARA configuration. I’ve used Marlin previously for a cartesian prototype, but I feel that SCARA is superior when trying to lower the cost while maintaining good repeatability and rigidity.
Lots of issues = lots of reasons to cooperate!
I’m excited to see you get further with the robot you showcased - are you planning on 3d printing the “arms” as well?
With the motors energized and holding it will be able to support itself and hold a few kilograms. It has enough torque to hold ten kilograms but I’m sure something would break before that happened.
I’ve ordered some nice lights so I can shoot high quality YouTube videos and plan to shoot plenty of videos of my progress in the future!
A strong start. Some other open source 5+DOF arms include MANTIS, BCN3D, and THOR.
How will you seal the gearing away from debris, dust, liquid, and tiny fingers?
Actually the finger crushing is a feature. Dislike your fingers? Get them anywhere near the thing while it is operating.
I have no plans for finger protection. For now I am focused on power even at the expense of human safety. The device should not be operated when people are near if you wish to comply with typical human safety ratings. My plan is just to be careful.
Thanks for the list of arms. I’ve seen THOR, but don’t recall the others. I will check them out.